Промышленные клетки для кроликов
Промышленные клетки для кроликов призваны вмещать в себя солидное кроличье поголовье, при этом максимально снижая трудовые затраты кролиководов. Эти конструкции имеют большие размеры, и разделены на множество отделений, каждое из которых используется под свою цель. В таких клетках кролики не только полноценно взращиваются, но и набирают вес намного быстрее и продуктивнее, чем в обычных. Давайте посмотрим, какими они бывают, и можно ли их сделать своими руками в домашних условиях.

Промышленные клетки для кроликов
Содержание пошаговой инструкции:
- 1 Виды промышленных моделей клеток для кроликов
- 2 Промышленные модели клеток для кроликов
- 2.1 Клетка модели «Окрол»
- 2.2 Клетка модели «Практика FR-231»
- 2.3 Клетка Золотухина
- 2.4 Клетка Михайлова
- 2.4.1 Промышленная клетка Михайлова своими руками
- 2.5 Клетка от НИИ Пушного звероводства и кролиководства
- 3 Подведем итоги
- 3.1 Видео — Клетки для кроликов промышленные
Виды промышленных моделей клеток для кроликов
Клетки, использующиеся для промышленного разведения ушастых, могут отличаться по множеству различных параметров. Основным из них, пожалуй, является будущий способ размещения этих клеток.
Таблица 1. В чем состоит отличие уличных промышленных клеток для кроликов от конструкций для закрытых помещений
| Уличные клетки промышленного типа обычно используют только в теплых регионах нашей страны, так как эти громоздкие конструкции очень сложно перемещать с места на место. Выполняются уличные клетки следующим образом: они располагаются у стены какого-либо помещения, или у забора, которые часто и служат задней стенкой клеткам; боковые стенки клеток сплошные, закрывающие внутренние помещения от ветра и дождя; передние стенки сетчатые. | Клетки, располагающиеся внутри помещения, делаются, как правило, из стальных сеток, дабы таким образом животным обеспечивалась беспрерывная вентиляция. Однако, эти клетки обычно и менее вместительны, в них влезает не более ста питомцев, да и такое количество содержать в помещении уже довольно сложно, так как размеры двухсторонних клеток в любом случае не могут быть такими же солидными, как и у уличных. Клетки, размещаемые в помещениях, используются в средней полосе нашей страны и ее северных регионах. |

Полностью сетчатые клетки, не защищенные стенками, не могут устанавливаться на улицу
После того, как вы определитесь с местом размещения клетки, нужно будет продумать ее будущую конструкцию. Одно промышленное приспособление должно содержать в себе несколько различных по функционалу помещений.
1. Так, в групповых помещениях для кроликов содержат подросший молодняк, возраст которого достиг примерно полутора месяцев. При этом еще перед посадкой в клетки, появившихся на свет особей делят в уме на две группы:
- идущих под забой на мясо или на мех;
- тех, кто будет продолжать род.
Так, «продуктовых» кролей содержат в клетке в количестве не более 10 штук. Величина же данного отсека будет такова: на одну особь приходится по 0, 12 квадратного метра.
Племенных же особей содержат в группах до 8 голов, при этом каждый из них должен иметь в распоряжении по 0, 17 квадратного метра.
При этом, любая клетка для молодняка, независимо от дальнейшей направленности его использования, должна находиться на приличном удалении от земли, в хорошо освещенном месте.

Один из вариантов промышленных клеток, выполненных в домашних условиях
2. Подросших кроликов примерно в возрасте в три месяца от рождения:
- перемещают в отдельные клетки, если речь идет о племенном разведении;
- оставляют содержаться в групповых помещениях, проводя обязательную кастрацию.
Величина клеток в каждом из перечисленных случаев будет варьироваться в зависимости от породной принадлежности животных.
3. Двухместные помещения в клетках используют для размещения двух взрослых кроликов одинаковых полов.
4. Для самок на время окрола обустраивают так называемый маточник – аналог кроличьего родильного отделения, в котором крольчата появляются на свет и взращиваются мамой до достижения самостоятельности.

Внешний вид маточника
Чтобы разводить кроликов в условиях одной клетки, необходимо использовать многоярусную конструкцию, состоящую из так называемых модулей для содержания кроликов. Таким образом вы добьетесь следующих положительных эффектов:
- на малой площади сможете содержать солидное поголовье;
- обеспечите одной конструкцией все необходимые помещения для кроликов;
- сможете собирать навоз из клеток автоматически.
Искомые многоярусные конструкции, как правило, представлены следующими параметрами:
- до метра в глубину;
- до двух метров в ширину;
- расположение на высоте в 60 метров от земли.

Многоярусные конструкции подходят для содержания кроликов на откорм, племенное разведение и т.д.
Изготавливаются они обычно из фанеры, дерева и металлической сетки, ячеистой, либо стальной. Габариты могут варьироваться в зависимости от количества особей, которых вы хотите содержать.
Промышленные модели клеток для кроликов
На сегодняшний день наибольшую популярность среди кролиководов завоевали некоторые модели клеток промышленного образца, использующиеся повсеместно, и показывающие отличные результаты. Рассмотрим их далее.
Клетка модели «Окрол»
Данная модель предназначена для содержания в основном следующих ушастых:
- маток, производящих на свет крольчат;
- молодняка, в дальнейшем идущего на мясо.
Весь нижний этаж данного сооружения представлен двенадцатью помещениями для кроликов, каждое из которых может быть разделено на две части и дополнено маточником.

Клетка модели «Окрол»
Верхний же этаж конструкции представлен шестнадцатью клетками, предназначенными для размещения молодых крольчат.
Кроме того, оснащена такая клетка не совсем обычными кормушками. Так, эти приспособления для еды кроликов сделаны так, что:
- звери не могут выгрести из них пищу наружу;
- их перфорированное основание позволяет автоматически отсеивать из корма мелкий мусор и пыль.
Такая клетка обычно размещается в условиях помещения, для улицы ее использовать запрещено, ведь она открыта со всех сторон, а излишне интенсивная вентиляция может привести к падению кроличьего стада.
Клетка модели «Практика FR-231»
Данная модель представляет собой конструкцию, состоящую традиционно из двух ярусов:
- нижний ярус имеет 12 отделов и предполагает размещение внутри каждого маточников;
- верхний имеет шесть отделов, и внутрь него также можно устанавливать маточник, либо содержать молодняк.

Клетка модели «Практика FR-231»
Данная модель используется в фермерских хозяйствах, где практикуется разведение кроликов на мясо. Вместить в себя она может не более 90 особей.
Нужно отметить, что данная конструкция может трансформироваться, и подойдет для содержания зверей, как на откорм, так и на продолжение рода и разведение. Каждый из ярусов имеет крышки, оснащенные пружинами, что позволяет быстро и без труда очищать помещения для животных.
Клетка Золотухина
Данная клетка была разработана знаменитым кролиководом Золотухиным, и сегодня используется повсеместно. Как правило, внутрь нее заселяется молодняк, так как маточника схема построения данной клетки не предусматривает.

Обустройство промышленной клетки Золотухина
Тем не менее, если вам необходимо заселить окролую матку в клетку, то в летнее время возможно формирование гнезда из сена, которое она самостоятельно дополнит выдернутым у себя пухом, и сможет содержать там крольчат.
Кормушки же крепятся снаружи клетки Золотухина непосредственно на сетку, при этом, они обязательно должны:
- либо опрокидываться;
- либо сниматься с сетки.
В противном случае их довольно сложно будет промыть.
Клетка Михайлова
Данная клетка по праву пользуется успехом у кролиководов, так как благодаря ее необычной конструкции, уход за ушастыми превращается для фермеров в приятное занятие, которое нужно осуществлять не так уж и часто. Так, корм подсыпается в клетку примерно раз в 4-5 дней, а чистка производится еще реже, так как все кроличьи испражнения автоматически сливаются в герметичную емкость под конструкцией.

Клетка Михайлова
Давайте рассмотрим, как собрать промышленную клетку Михайлова своими руками.
Промышленная клетка Михайлова своими руками
Шаг №1 — необходимые материалы
Данная клетка выполняется из материалов, которые имеются практически в каждом хозяйстве. И даже если у вас таковых не найдется, купить их весьма просто. Итак, нам потребуется:
- листы толстой фанеры;
- краска;
- гвозди;
- листы оцинкованного железа;
- деревянные брусья;
- деревянные доски;
- рубероид;
- древесноволокнистые панели, твердые и мягкие;
- штакетник.

Элементы конструкции клетки Михайлова
После сборки материалов переходим к изготовлению клетки.
Шаг №2 – собираем нижний ярус клетки Михайлова
В первую очередь нам необходимо собрать основание клетки, на которое устанавливаются кроличьи домики.
Его сбор будет происходить аналогично представленной выше фотографии. Так, в стойку устанавливается вывод для шахты, венчающийся герметичным бачком, внутрь которого будут собираться:
- моча кроликов;
- фекалии ушастых.

В первую очередь собираем основание для клетки
Саму же шахту, выходящую их основания, необходимо оббить древесноволокнистым материалом для утепления, так как даже при условии, что клетка Михайлова будет стоять в помещении, шахта все равно может промерзать. ДВП сверху покрывают любым утеплителем, устойчивым к холоду, а затем оббивают деревом либо железом.
Затем переходим к изготовлению нижнего яруса, представленного следующими отделениями:
- выгульным;
- гнездовым.
Это отделение нужно поставить на четыре стойки, в свою очередь устанавливающиеся на ранее собранное основание. Восточная стена яруса будет представлена сворной сеткой, с проделанной внутри прорехой, равной 25 миллиметрам.
Остальные стенки будут закрытыми. Сам ярус нужно поделить на несколько отделений, среди которых обязательно должно быть:
- убежище, где кролики могут прятаться;
- помещение-ловушка, где ушастые будут вами задерживаться для проведения отселения или ветеринарного осмотра.
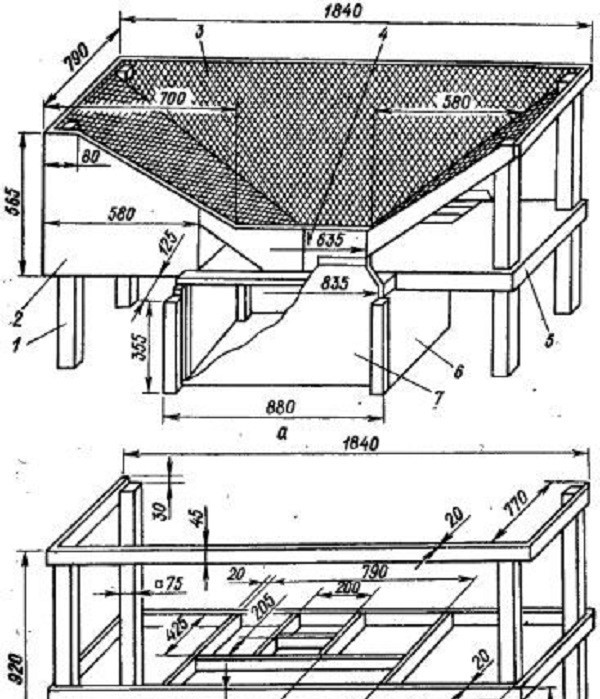
Сооружение частей клетки Михайлова, чертеж
В отделение для выгула устанавливается поилка с чистой водой и кормушка бункерного типа. В самой нижней точке данного отделения необходимо пробурить отверстие, которое как раз таки и будет вести к сборнику навоза. Желательно сместить его вправо, дабы оно располагалось четко над шахтой.
Пол в данных отделениях делается из штакетника, который в свою очередь настилается на каркас из реек, располагающийся над окном для сбора навоза.
Снизу рейчатый пол обивают железом. Настил производится под наклоном в 45 градусов.
Теперь переходим к гнездовому отделению. Его нужно собрать так, чтобы дверца в отсек могла открываться, образуя открытую площадь и своего рода стол. Данное отделение имеет сплошное половое покрытие, его можно делать из деревянных досок. Снаружи стены клетки в этой точке утепляются. С другой стороны комнатушка оснащается лазом, который перекрывается вставляемой в него сбоку (снаружи) пластиной или дверкой.

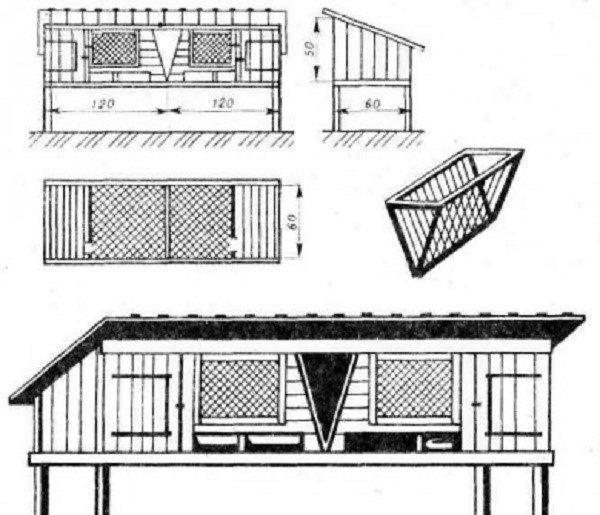
Готовая клетка Михайлова
Между отделением для выгула и другими зонами клетки необходимо разместить автоматизированную поилку, можно вакуумную, сделанную из обычной миски и пятилитрового бутыля с водой. К слову, миска на какую-либо часть должна выступать из помещения, дабы снаружи в нее можно было подключить электрический нагреватель.
Дверцы в каждый из отсеков выполняются непосредственно из досок или фанеры, а заслонки, препятствующие ушастым попасть в гнездо, делаются из листового железа.
Кормушка в данной клетке оборудуется посредством введения ее нижней частью в дыру между полом клетки, под ней же устанавливается утилизатор, в который станет ссыпаться мусор и пыль из кормушек. Изнутри кормушка оснащена как-бы приступком, который будет мешать кроликам выгребать пищу из контейнера.

Поилка и кормушка для зерна по методу Михайлова, схема
Шаг №3 – собираем верхний ярус клетки Михайлова
Теперь переходим к сборке верхнего яруса клетки Михайлова.
В нем не предусмотрено гнездового отделения для выведения крольчат, поэтому, при постройке вы должны:
- либо дополнить одно из помещений яруса маточником;
- либо оборудовать всю клетку полностью для отсадки молодняка.
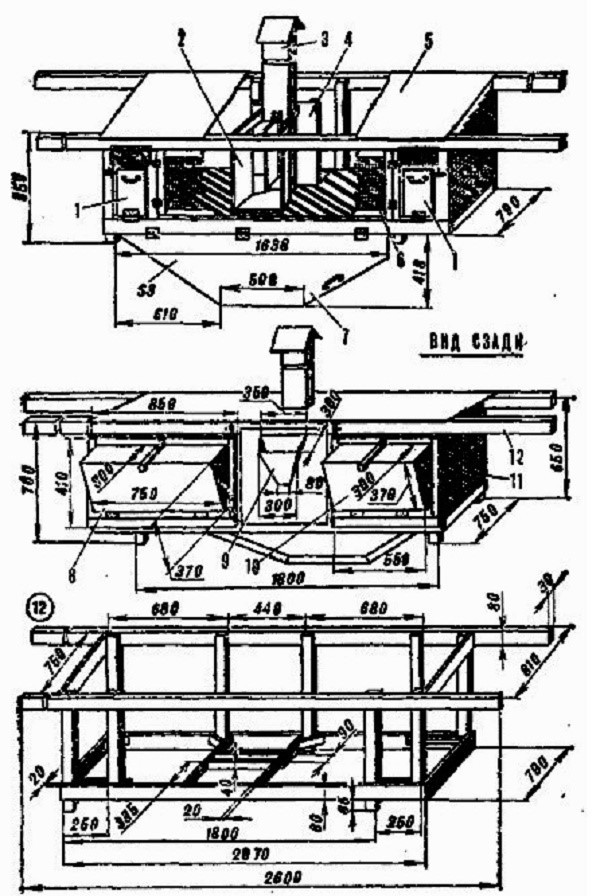
Клетка Михайлова, чертеж верхнего яруса
Верхний ярус будет на целых 25 сантиметров больше, чем нижняя часть конструкции, поэтому с одной из сторон он станет выступать, и этот выступ нужно будет подпереть снаружи брусом.
При условии, что вы решили-таки оборудовать маточник, дно нужно делать двухуровневым, в противном же случае на доски просто стелятся рейки, укладывающиеся перпендикулярно нижнему уровню.

Шахта для сбора фекалий проходит по всем ярусам
В каждую секцию верхнего яруса по аналогии с нижними отделениями устанавливается кормушка. Между каждым отделением монтируются дверцы, сделанные с учетом физических особенностей крольчат. Южная часть данного яруса должна быть оснащена прозрачной дверцей.
Собрав клетку, можете засыпать корм, и сразу же вводить конструкцию в эксплуатацию.
Клетка от НИИ Пушного звероводства и кролиководства
Данная промышленная клетка была придумана научными сотрудниками упомянутого НИИ. Она предназначается для содержания взрослых животных, и состоит из двух сегментов.
Клетка от НИИ Пушного звероводства и кролиководства
С боковой части конструкции устанавливаются маточники для крольчих. В этом месте половое покрытие выполняется из цельной древесной доски. От отделения для употребления корма данная секция отделяется стенкой с прорехой в виде лаза. В остальных же отделениях пол представлен стальной сеткой.
С передней стороны клетки стоят две сплошные деревянные двери, оснащенные створчатыми вставками из ячеистой сетки. В свлю очередь на эти вставки крепятся кормушки.

Промышленные клетки для кроликов помогают сделать производство конечного продукта наиболее эффективным
Подведем итоги
Если у вас отсутствуют строительные навыки, возвести клетку для кроликов промышленного варианта будет непросто, поэтому, возможно вам лучше будет задуматься именно о ее покупке. С другой стороны, если вы все же захотите разобраться, то потратите время, но в итоге справитесь с самостоятельным изготовлением конструкции. Есть ли у вас время на сборку клетки, решайте сами. В любом случае, изучив этот материал, вы сможете понять, какая конструкция лучше всего подходит для вашего дела.
Видео — Клетки для кроликов промышленные











| « Апрель 2024 » | ||||||
|---|---|---|---|---|---|---|
| Пн | Вт | Ср | Чт | Пт | Сб | Вс |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | |||||

